一、项目背景
随着工业自动化进程推进,多品种、少批量的定制化生产模式和非结构化作业场景将成为未来企业的生产常态。这要求自动化系统,在保证成本效益前提下,需具备更大的柔性和适应性来处理不同形状、大小和材质的零件。在未来复杂多变的任务中,低成本的自适应抓取技术将因此成为未来机器人应用成功的关键,而其中的执行装置-多指机器人抓手(也称多自由度抓手)将起着决定作用。 定制化作业的通用性,安全性和成本效益对新一代机器人抓手的设计提出了更高要求。它们不但要能抓取各种形状零件,也要能确保抓取过程稳定,另外,还必需控制简单、性价比高。现有的多指抓手只能部分地满足上述指标, 离定制化的作业要求仍有巨大差距。本成果旨在提供一种基于单驱动器的多指自适应抓手设计技术,为定制化作业中的各种异形元件的抓取与装配提供一种低成本的解决方案。其核心技术已申请专利并获中国专利局授权。
二、团队优势
团队成员 10 人,其中教授 3 人,副教授 3 人,讲师 2 人,工程师 2 人,主要成员在机器人领域都具有一定影响力。
三、技术特点
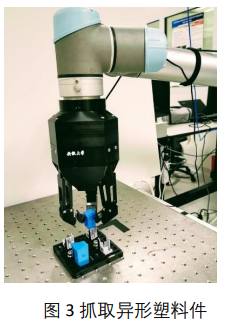
通过设计独特的悬浮欠驱动机构,团队已研发出一系列通用自适应多指抓手,部分型号样机已在异形塑料件的上下料和电熨斗底板的打磨生产线上获成功应用。这些抓手均为单驱动器驱动,但具有多指并联自适应功能,在异状物件的抓取方面,与基于多驱动器的多自由度抓手具有相同的自适应性,然而价格低廉。系统只需给出简单抓/放命令,手指间的复杂自适应动作由手指与物体接触生成的机构运动协调完成,而非弹性元件的柔性。在抓取过程中,即使没有任何力传感器,系统也能最大程度地自动确保抓取力的均匀分布。这个特点也使得抓手能确保物体在抓取前后的位姿不变,从而解决了现有多指抓手存在的自适应与精密装配要求通常不兼容问题。因此,本成果展示的抓手,不但能抓取不规则物体还能用于精密装配,是抓取-装配两用的自适应抓手。
四、产品优势
1)只有一个驱动器(气动或电动),不需复杂的控制算法,易操作。
2)抓取不需精密视觉系统定位,降低系统成本
3)每个手指的抓取力均匀分布,确保抓取稳定,零件安全
4)不但能自动适应零件的形状/位置变化,还能保证抓取前后异形零件的位姿不变
5)能容忍零件/抓手之间的位置误差,节省机器人示教时间
6)在多品种小批量生产线中不需切换抓手,生产流程更顺畅
7)允许零件尺寸/形状有大的变化范围,适应零件加工误差
8)解决异状零件从卡具到卡具的抓取过程中的异常抓取力问题
9)价钱少过同类自适应抓手的 1/5
主要技术指标
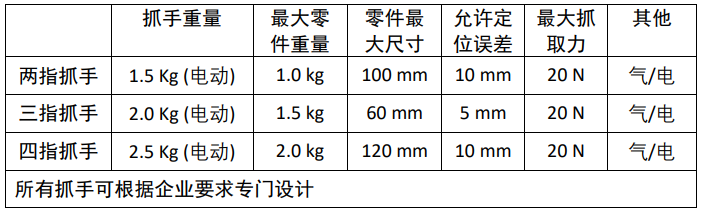
产品类型


五、应用领域
1) 柔性制造或物流分拣场景中的物件抓取操作
2) 用于在 3C 生产线上的各种异形元器件的抓取和操作,
3) 垃圾分类中对各种异形物件的抓取
4) 机床 CNC 上下料操作
5) 异形塑料件的自动检测操作
6) 卡具对卡具的非对称零件抓取操作
7) 散乱零件的低成本抓取
应用实例分析
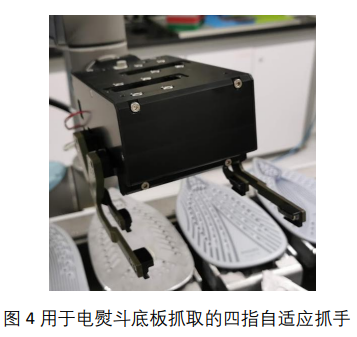
电熨斗自动化装配线需要将电熨斗底板插入打磨机里进行抛光处理。底板必 须准确放入打磨机里的卡具内。由于底板形状和尺寸变化,现行的机器人抓手 很难保证物体在抓取后位姿的确定性,因此无法确保底板能准确放入卡具内。 公司之前只能通过人工来进行这样的操作。为解决这个矛盾,我们提出了“并联 自适应”概念,即抓手的自适应性不是通过冗余自由度,而是通过手指之间的运 动协调来获得。基于这个概念,我们研发出了如图 4 所示的通用自适应抓手, 它不但能抓取异状物体,还能包容零件的定位和形状误差。这大大拓展自适应 抓手的应用。2018 年,所开发的“通用自适应抓手”技术被飞利浦(新加坡)公 司采用, 如图 5 所示,实现了单一夹持器抓多种电熨斗底板功能。更重要的是, 它确保了在简单视觉条件下,底板从传送带到卡具的准确插入操作 。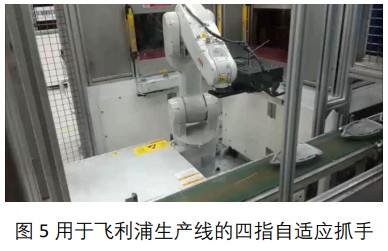
六、市场分析
随着多品种少批量这种生产模式在将来越来越普遍,与异形零件操作相关 的装置如自适应抓手,将会受到市场的青睐和重视。目前运用工业机器人完成 搬运、抓取等操作的工序占到所有机器人应用中的 60%以上,机器人自适应抓 手已成为完成机器人抓取的重要工具。随着协作机器人手臂的爆发式增长,机 器人行业对于高灵巧度、适应性强的机器人抓手的需求也在急剧增长。以自适 应抓手为例,如果每台柔性装配线上的工业机器人配备一个抓手,就其产品其 市场规模将达到每年 50 亿。算上在医疗机器人,服务机器人,特种机器人领域 的应用,整个市场规模将突破 200 亿。未来,随着协作机器人的崛起,自适应 抓手将被赋予更多新兴应用。因为协作机器人主要面向轻量化、多样化环境, 和自适应抓手的应用场景相匹配。反过来,创新的自适应抓手产品与技术也会 拓展机器人的应用领域,打开很多潜在应用。
七、产业化方式
A) 技术转让:根据柔性制造企业的具体要求,开发出能解决企业瓶颈问题的自适应抓手。通过工业项目或技术授权使用等方式,实现技术转让,帮助企业提高生产力
B) 团队通过与安徽省伙伴企业合作(参股)等形式,孵化设立一家与智能抓取技术相关的高科技公司,并以各种自适应抓手为产品。争取五年后公司市值达1亿元人民币。




